
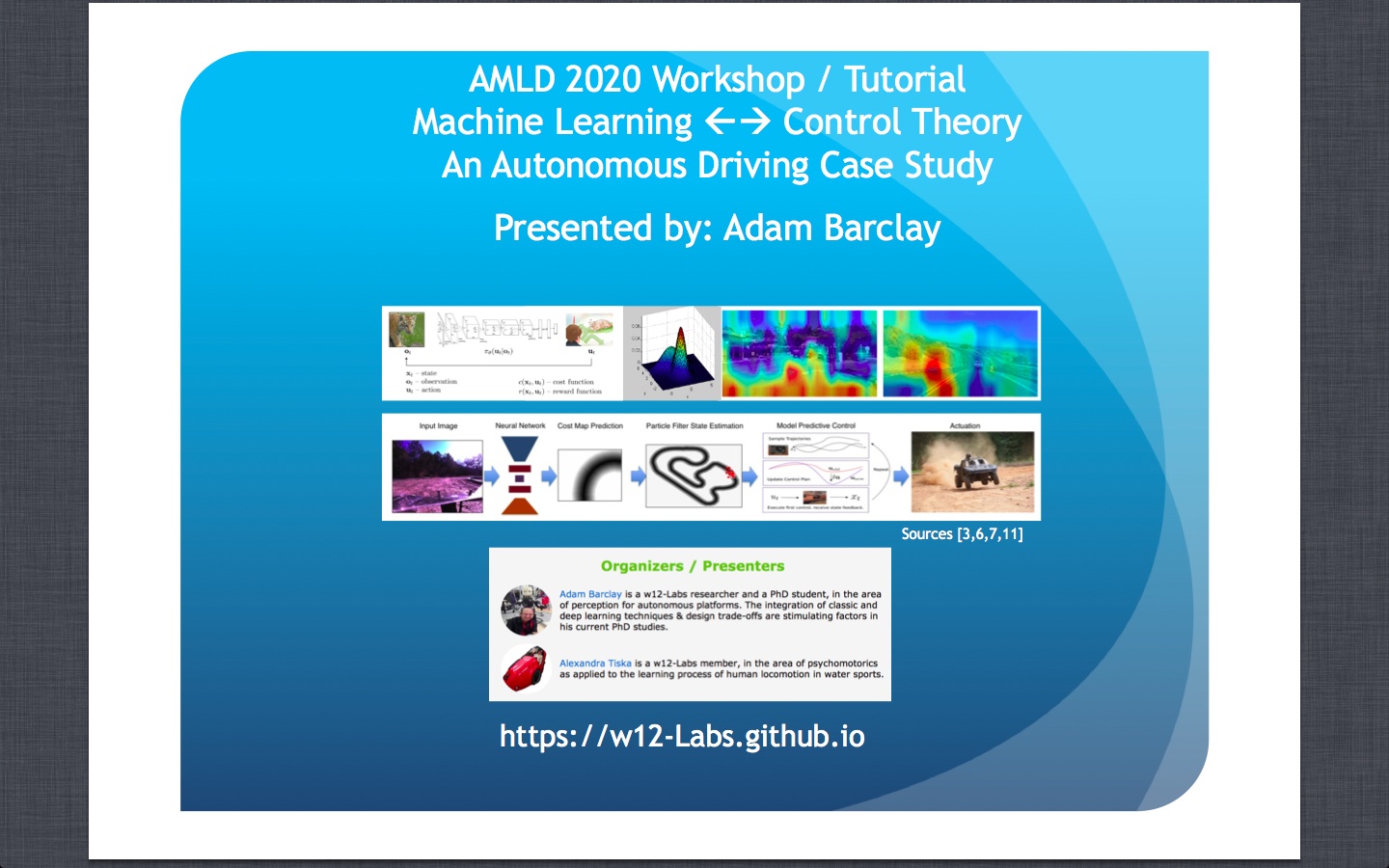
AMLDEPFL 2020 Workshop/Tutorial
From Machine Learning to Control Theory
An Autonomous Driving Case Study
Presented by: Adam Barclay
Date and Venue:
Sunday, January 26, EPFL, Lausanne, Switzerland
| |
AMLDEPFL 2020 Workshop/Tutorial |
|
|
This half-day tutorial addresses the emergence of machine learning techniques, specifically reinforcement learning, within the classic control domain for image-based and non-image based applications. Segway-like platforms and autonomous driving scenarios serve as illustrative models, providing additional insight of learning-based control approaches. The hands-on component starts with a code walk-through, to modify and experiment with simulator-based learning algorithms. Subsequently, the simulator-trained models are then deployed on 1:10 scale rovers for testing and evaluation. Furthermore, selected topics such as performance metrics, generalization, and architectural design / debugging concepts will be covered as time allows. Participants are encouraged to form 2-4 person groups for an end of session competition. |
|
|